在线OJ刷题
题目描述
下图中,每个方块代表一个像素,每个像素用其行号和列号表示。
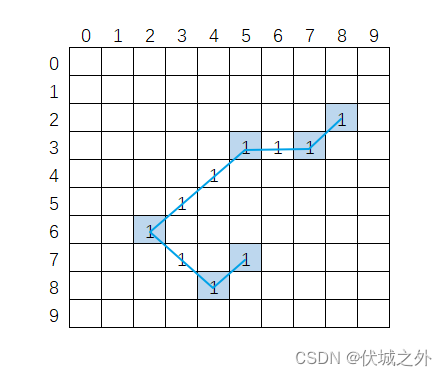
为简化处理,多线段的走向只能是水平、竖直、斜向45度。
上图中的多线段可以用下面的坐标串表示:(2,8),(3,7),(3,6),(3,5),(4,4),(5,3),(6,2),(7,3),(8,4),(7,5)。
但可以发现,这种表示不是最简的,其实只需要存储6个蓝色的关键点即可,它们是线段的起点、拐点、终点,而剩下4个点是冗余的。
现在,请根据输入的包含有冗余数据的多线段坐标列表,输出其最简化的结果。
输入描述
2 8 3 7 3 6 3 5 4 4 5 3 6 2 7 3 8 4 7 5
- 所有数字以空格分隔,每两个数字一组,第一个数字是行号,第二个数字是列号;
- 行号和列号范围 为 [0, 64),用例输入保证不会越界,考生不必检查;
- 输入数据至少包含两个坐标点
输出描述
2 8 3 7 3 5 6 2 8 4 7 5
压缩后的最简化坐标列表,和输入数据的格式相同。
备注
输出的坐标相对顺序不能变化
用例
| 输入 | 2 8 3 7 3 6 3 5 4 4 5 3 6 2 7 3 8 4 7 5 |
| 输出 | 2 8 3 7 3 5 6 2 8 4 7 5 |
| 说明 |
如上图所示,6个蓝色像素的坐标依次是: (2, 8)、(3, 7)、(3, 5)、(6, 2)、(8, 4)、(7, 5) 将他们按顺序输出即可。 |
题目解析
本题其实就是要我们保留拐点。
那么怎么判断一个点是不是拐点呢?
拐点拐点,自然是运动方向发生改变的点。
那么如何判断一个点的运动方向呢?
运动,指的是从点A到点B,而运动的方向,自然是点A到点B的方向。那么如何描述点A到点B的方向呢?
假设点A(2, 8),点B(3 7),那么此时点A到点B的偏移量为:
offsetX = 3 – 2 = 1
offsetY = 7 – 8 = -1
则(offsetX, offsetY)就是A→B的向量坐标。
当然还有可能出现这样的情况,比如A坐标(3,5),B坐标(6,2),此时A→B向量坐标为(3, -3)
此时(3,-3)向量的方向其实和(1,-1)是相同的。
因此,我们需要对这种向量做简化,方便后续相同方向的比较,即将(3,-3)简化为(1,-1),字面上看,其实就是横坐标、纵坐标都除以3,那么base=3该如何求解呢?求解公式如下
base = max(abs(offsetX), abs(offsetY))
这个公式的好处是,兼容(-5, 0),(0, 10)这种向量。
当我们知道了A→B的方向,那么只要判断下一步B→C的方向是否发生改变,如果发生改变,那么就可以确定B是拐点,比如
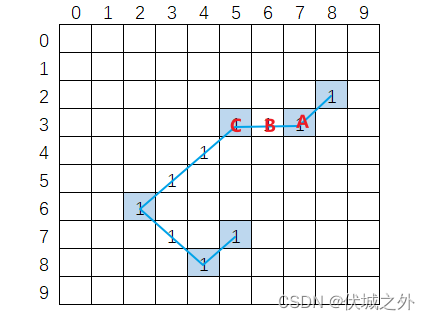
A→B的向量为(-1, 0)
B→C的向量为(-1, 0)
因此B不是拐点
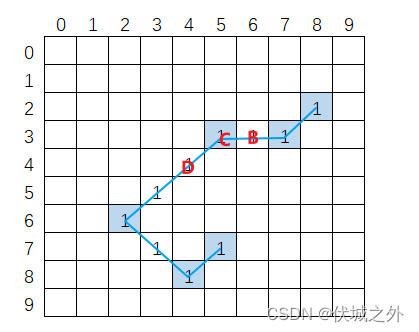
B→C的向量为(-1, 0)
C→D的向量为(1, -1)
因此C是拐点
JS算法源码
const rl = require("readline").createInterface({ input: process.stdin });
var iter = rl[Symbol.asyncIterator]();
const readline = async () => (await iter.next()).value;
void (async function () {
const nums = (await readline()).split(" ").map(Number);
console.log(getResult(nums));
})();
function getResult(nums) {
const ans = [];
// 上一个点坐标(preX, preY)
let preX = nums[0];
let preY = nums[1];
// 上一次的运动方向(preDirectX, preDirectY)
let preDirectX = 0;
let preDirectY = 0;
for (let i = 2; i < nums.length; i += 2) {
// 当前点坐标(curX, curY)
const curX = nums[i];
const curY = nums[i + 1];
// 上一个点到当前点的偏移量(offsetX, offsetY)
const offsetX = curX - preX;
const offsetY = curY - preY;
// 根据偏移量得出本次的运动方向
const base = Math.max(Math.abs(offsetX), Math.abs(offsetY));
const directX = offsetX / base;
const directY = offsetY / base;
// 如果两次运动的方向不同
if (directX != preDirectX || directY != preDirectY) {
// 则上一个点是拐点,需要记录下来
ans.push(preX, preY);
}
preX = curX;
preY = curY;
preDirectX = directX;
preDirectY = directY;
}
// 注意收尾
ans.push(preX, preY);
return ans.join(" ");
}
Java算法源码
import java.util.Arrays;
import java.util.Scanner;
import java.util.StringJoiner;
public class Main {
public static void main(String[] args) {
Scanner sc = new Scanner(System.in);
int[] nums = Arrays.stream(sc.nextLine().split(" ")).mapToInt(Integer::parseInt).toArray();
System.out.println(getResult(nums));
}
public static String getResult(int[] nums) {
StringJoiner sj = new StringJoiner(" ");
// 上一个点坐标(preX, preY)
int preX = nums[0];
int preY = nums[1];
// 上一次的运动方向(preDirectX, preDirectY)
int preDirectX = 0;
int preDirectY = 0;
for (int i = 2; i < nums.length; i += 2) {
// 当前点坐标(curX, curY)
int curX = nums[i];
int curY = nums[i + 1];
// 上一个点到当前点的偏移量(offsetX, offsetY)
int offsetX = curX - preX;
int offsetY = curY - preY;
// 根据偏移量得出本次的运动方向
int base = Math.max(Math.abs(offsetX), Math.abs(offsetY));
int directX = offsetX / base;
int directY = offsetY / base;
// 如果两次运动的方向不同
if (directX != preDirectX || directY != preDirectY) {
// 则上一个点是拐点,需要记录下来
sj.add(preX + " " + preY);
}
preX = curX;
preY = curY;
preDirectX = directX;
preDirectY = directY;
}
// 注意收尾
sj.add(preX + " " + preY);
return sj.toString();
}
}
Python算法源码
# 输入获取
nums = list(map(int, input().split()))
# 算法入口
def getResult():
ans = []
# 上一个点坐标(preX, preY)
preX = nums[0]
preY = nums[1]
# 上一次的运动方向(preDirectX, preDirectY)
preDirectX = 0
preDirectY = 0
for i in range(2, len(nums), 2):
# 当前点坐标(curX, curY)
curX = nums[i]
curY = nums[i + 1]
# 上一个点到当前点的偏移量(offsetX, offsetY)
offsetX = curX - preX
offsetY = curY - preY
# 根据偏移量得出本次的运动方向
base = max(abs(offsetX), abs(offsetY))
directX = offsetX // base
directY = offsetY // base
# 如果两次运动的方向不同
if directX != preDirectX or directY != preDirectY:
# 则上一个点是拐点,需要记录下来
ans.extend([preX, preY])
preX = curX
preY = curY
preDirectX = directX
preDirectY = directY
# 注意收尾
ans.extend([preX, preY])
return " ".join(map(str, ans))
# 算法调用
print(getResult())
C算法源码
#include <stdio.h>
#include <math.h>
#define MAX_SIZE 20000
int main() {
int nums[MAX_SIZE];
int nums_size = 0;
while (scanf("%d", &nums[nums_size++])) {
if (getchar() != ' ') break;
}
// 上一个点坐标(preX, preY)
int preX = nums[0];
int preY = nums[1];
// 上一次的运动方向(preDirectX, preDirectY)
int preDirectX = 0;
int preDirectY = 0;
for (int i = 2; i < nums_size; i += 2) {
// 当前点坐标(curX, curY)
int curX = nums[i];
int curY = nums[i + 1];
// 上一个点到当前点的偏移量(offsetX, offsetY)
int offsetX = curX - preX;
int offsetY = curY - preY;
// 根据偏移量得出本次的运动方向
int base = (int) fmax(abs(offsetX), abs(offsetY));
int directX = offsetX / base;
int directY = offsetY / base;
// 如果两次运动的方向不同
if (directX != preDirectX || directY != preDirectY) {
// 则上一个点是拐点,需要记录下来
printf("%d %d ", preX, preY);
}
preX = curX;
preY = curY;
preDirectX = directX;
preDirectY = directY;
}
// 注意收尾
printf("%d %d", preX, preY);
return 0;
}免责声明: